-
CALVIN — a neural network that can learn to plan and navigate unknown environments
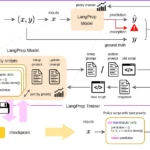
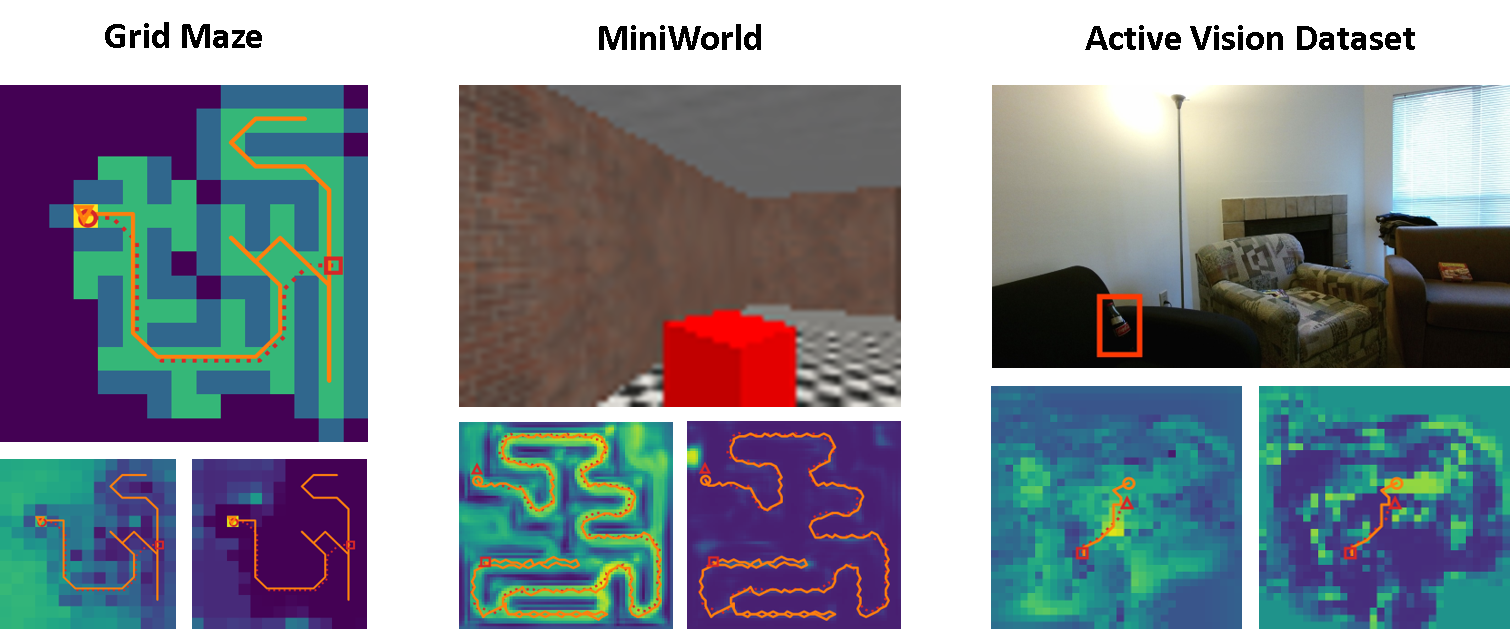
Summary: CALVIN is a neural network that can plan, explore and navigate in novel 3D environments. It learns tasks such as solving mazes, just by learning from expert demonstrations. Our work builds upon Value Iteration Networks (VIN) [1], a type of recurrent convolutional neural network that builds plans dynamically. While VINs work well in fully-known…
Shu Ishida
Senior AI Research Scientist at Autodesk | Machine Learning DPhil, University of Oxford